中国科学院自动化研究所宣布,研究团队通过记录猕猴运行自然抓取任务时的神经活动,首次发现在大脑的运动皮层中存在一种类似全球定位系统(GPS)的神经编码机制,能够在抓取过程中实时表征手在空间中的位置。这一神经科学领域重要研究发现,为理解大脑如何控制运动提供了全新的视角,并为脑机接口的设计和机器人运动控制带来重要启发。相关成果论文近日在国际学术期刊《自然-通信》发表。
中新社报导,论文第一作者、中国科学院自动化所博士研究生曹盛浩介绍说,人类以及猕猴等灵长类动物的手臂可以灵巧地运行各种抓取任务。大脑如何规划和运行这些任务一直是神经科学的内核问题之一。此前的研究表明,大脑海马体中的「位置细胞」能够为身体导航提供空间信息,帮助动物构建认知地图。然而,对于手等身体部位的运动,是否存在类似的导航框架一直是个未解之谜。
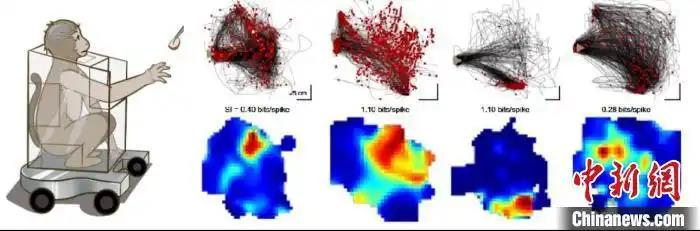
本项研究中,合作团队通过在4只猕猴的大脑背侧前运动皮层(PMd)植入微电极数组,记录它们在自然抓取任务中的神经活动,并通过多个摄像头记录猕猴手部的运动轨迹,分析PMd神经元在抓取任务中的活动模式。
研究发现,约22%的PMd神经元在手部处于特定空间位置时活动显著增强,形成了「位置野」。这些神经元能够实时、高效地表征运动中的手位置,仅使用50个最活跃的位置神经元(约占总记录神经元的10%),就能以80%的准确率解码手部运动轨迹。该结果表明,手位置信息在PMd中以「位置野」编码的形式存在,类似于海马体中用于导航的位置细胞。
进一步研究发现,手位置信息与手的运动方向、速度和抓取目标的位置等信息在同一个PMd神经元群体中共同编码。这种混合编码方式使得大脑能够同时考虑空间信息和运动信息,从而实现高效的运动规划和运行。这一混合编码方式也正是海马体在空间导航任务中所采用的方式,提示大脑利用相似的神经计算框架实现不同尺度上的空间导航。
研究团队表示,通过解码这些位置神经元的活动,未来可能实现更精准高效的神经假肢控制,同时,可以基于大脑的运动导航原理,设计更加灵巧的机械臂控制算法。



{kind=link}